The previous post gave you a view into the communications architecture. Today we provide a more detailed view on the overall system based on its functions.
Craft Telemetry [Figure 1] is information flow from Pegasus II. This information is contains meteorological measurements as well as craft location and health.
The Ground Telemetry [Figure 2] communicates information about location as well as information relative between the 2 ground stations (launch & mobile) and the craft.
The Live Video [Figure 3] streaming video from Pegasus to the cloud and the launch site, which can be viewed on the Web site.
User Messages [Figure 4] allow users to send messages to Pegasus II while in flight from phone apps.
SMS Notifications [Figure 5] Pegasus II is capable of sending notes about interesting events during flight, e.g., when it is launched, altitude milestones, and the risky descent stage. Users can signup for these notifications and the craft will send you several text messages during the flight.
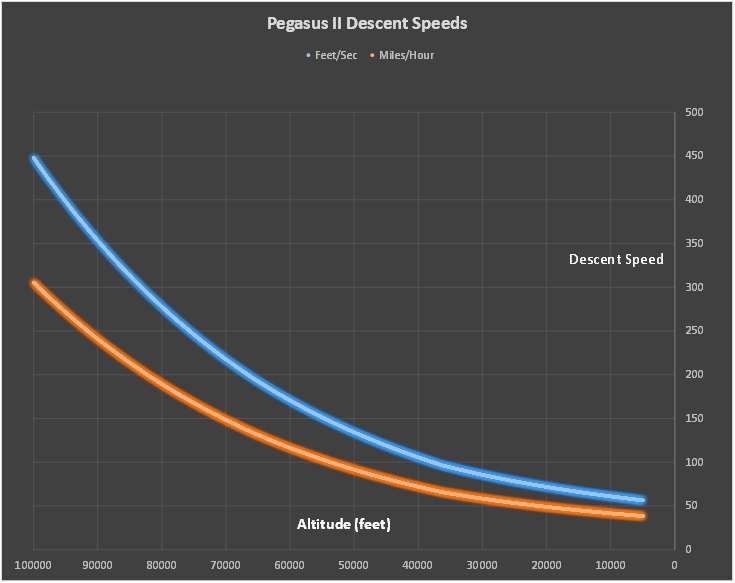
Flight Operations [Figure 6] are critical for control of Pegasus II during flight. The rotation of the live video and the Delivery System Release (DSR) are controlled by Mission Control. DSR is the point where we release the balloon and begin the descent stage. During descent we will plummet toward the surface of the Earth reaching speeds around 300 mph in rarified air. The main parachute deployment (MPD) occurs only 1500-3000 feet on the surface, not much time until impact. Therefore, we are adding an analytics package to quickly analyze the descent and automatically execute Pegasus II’s MPD command.
Finally, Mission Control can monitor aspects of the system [Figure 7] to understand the number of users connected to the system at any given time, messages sent and received, and the quantity of traffic within the system.
Launch window is 7/10/2015 – 7/24/2015 in Cheyenne, WY. Dare Mighty Things.
Figure 1 – Craft Telemetry

Figure 2 – Ground Telemetry

Figure 3 – Live Video

Figure 4 – User Messages

Figure 5 – SMS Notifications

Figure 6 – Flight Operations

Figure 7